测速雷达原理(测速雷达原理图)
数字信号处理系列文章。理论+实践。持续更新。欢迎关注@平凡的兵 一起共成长。
多普勒效应
什么是多普勒效应?声源同观察者有相对运动时。观察者接收到的频率同声源发射的频率不一样。大家听的比较多的应该是救护车的例子。如图1。救护车向你驶来时。声音越来越尖锐。离你远去时。声音逐渐变平。
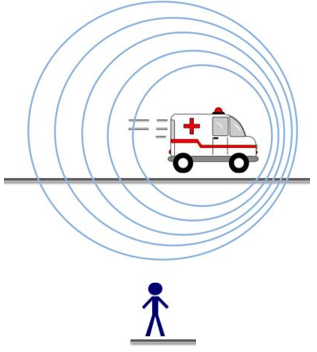
图1
再看个比较有意思的例子。如图2。观察者在移动声源的前方。当声源移动速度超过声速时。奇妙的现象出现了。观察者的方向听不到声音。除非声源经过观察者时。这时可能会产生音爆。如图3。

图3
如何定量分析呢?接下来上干货了[机智]。一式以蔽之:
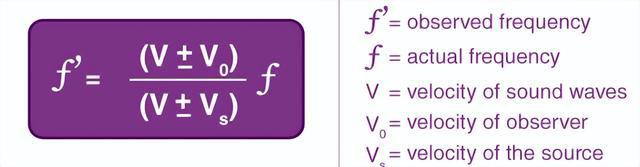
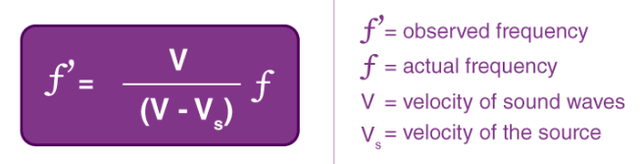
核心原理是
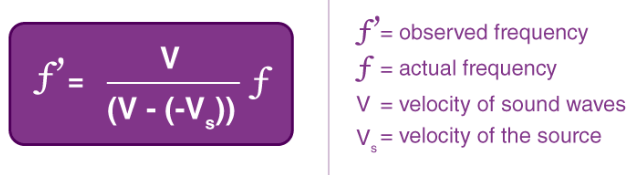
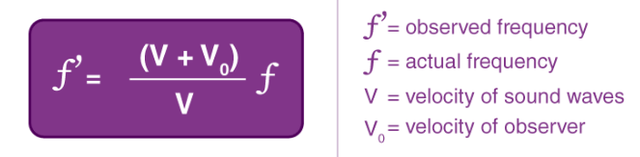
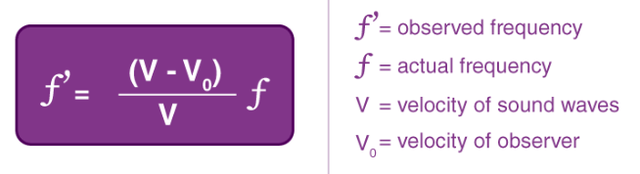
f是原始声源频率。f'是观察者接收到的频率。声音速度v。声源速度vs。观察者速度v0。分四种情况。
情况1:观察者不动。声源向观察者移动
情况2:观察者不动。声源远离观察者
情况3:声源不动。观察者向声源移动
情况4:声源不动。观察者远离声源
这里有个小笑话。一个物理学家闯红灯被警察拦下。警察问:“没看见交通灯吗?”物理学家说:“看到了。但是由于多普勒效应。交通灯向我发出的红色光频率变高。在我看来是绿色的。所以没有停车。这是自然规律。请理解。”警察想了想。说:“有道理。”便给物理学家开了张超速的罚单……[呲牙]
雷达目标测速
学以致用。下面进行实战。
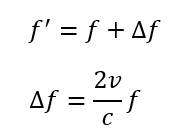
利用雷达回波进行飞机测速。物理基础就是多普勒效应(Doppler effect)。如图4所示。地面雷达发射的电磁波频率为。目标飞机以一定速度靠近雷达。目标飞机接收到的频率会发生变化。然后反射回去。雷达接收到的频率又会发生变化。
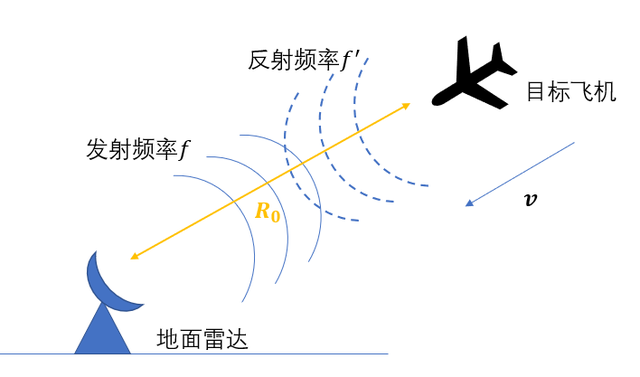
图4
由于目标运动导致的频率变化称之为多普勒频率。记为△f。
连续雷达回波可表示为

式中Ts为采样周期。q(n)为高斯白噪声。只要对上式进行DFT。然后再检索幅度谱的谱峰即可得到多普勒频率△f。从而计算出目标的速度v
数据仿真。雷达的发射信号f=10GHz。系统采样频率fs=0.25MHz。目标速度v=300m/s。距离为R0=8km。回波持续时间T=4ms。回波信号幅度A=0.01。图5为回波的时域信号。正弦信号完全淹没在高斯白噪声中。雷达回波的频域信号如图6。峰值出现在k=80处。对应多普勒频率

目标的速度

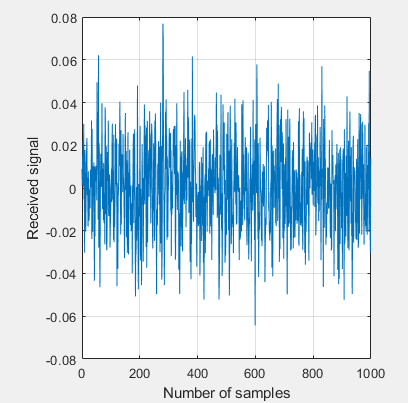
图5 回波的时域信号

图6 回波的频域信号
代码
%连续波雷达测速%包括连续波雷达回波数据仿真%利用DFT分析回波频谱。得到目标速度值c = 3e8; % 光速fs = 0.25e6; ts=1/fs; %采用频率和采样周期f = 10e9; % 雷达载频lambda = c/f; % 雷达工作波长T= 4e-3 % 回波持续时间R = 8e3; % 目标距离v = 300; % 目标速度delta_f = 2* v/lambda; % 多普勒频率A= 0.01; %衰减系数t = 0:ts:T-ts;N = length(t);s1 = A*exp(j*(2*pi*delta_f.*t - 4*pi*R/lambda));qr = A/0.5*randn(1。N);qi = A/0.5*randn(1。N);x1 = s1+qr+j*qi; % 单目标雷达回波X1=fft(x1);magX1 = abs(X1)/max(abs(X1));phaX1=angle(X1);n = 0:N-1;figure;subplot(1。2。1); plot(n。real(x1));xlabel('Number of samples'); ylabel("Received signal"); grid;subplot(1。2。2); plot(n。20*log10(magX1));xlabel('Number of samples'); ylabel("Amplitude |X(k)|"); grid;
参考资料
[1] https://byjus.com/physics/doppler-effect/
[2] https://en.wikipedia.org/wiki/Doppler_effect#cite_note-17
[3] 深入浅出数字信号处理









